The push towards sustainability has accelerated efforts to achieve net-zero carbon emissions. Electrification of vehicles is rapidly growing, primarily replacing internal combustion engine (ICE) vehicles that rely on fossil fuels. Hybrid electric vehicles (HEVs) serve as a transitional platform for vehicle users, facilitating the shift towards full electrification. To ensure efficient HEV performance, losses incurred by the motor, generator, and battery must be minimized. In this context, the motor controller in a power-split hybrid transmission model is optimized using the Jaya Optimization Algorithm (JOA).
Objectives and Analysis
Two objective functions were evaluated: speed regulation error and total electrical power loss. Three different analyses were performed on the fractional order PID (FOPID) controller. These analyses included a comparative study with the PID controller for the first objective function, an assessment of the FOPID controller based on the second objective function, and an analysis across three different driving patterns. Integrating FOPID into HEVs demonstrated overall improvements in speed regulation and total electrical losses.
Methodology
A Real-Time Multi-Objective Optimization Guided-MPC strategy (RMGMPC) was employed in [8] to optimize vehicle parameters for power-split hybrid electric buses (PSHEB) based on speed predictions, significantly impacting energy savings. Optimal power management, the overall electric drive system, and key power train components were enhanced using the interactive adaptive weight genetic algorithm (i-AWGA), improving energy consumption and battery health. The Jaya Optimization Algorithm (JOA) was used in combination with JOA-tuned PID controllers to deliver the best transient response for DC motors.
HEV Power Split Architecture
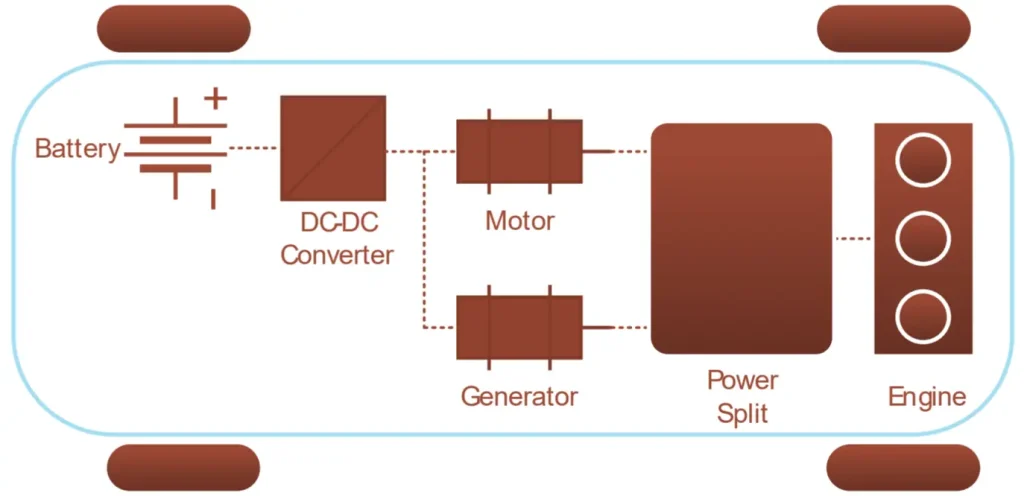
HEVs are powered by an internal combustion engine (ICE) and an electric motor, with the latter being powered by a battery. Unlike PHEVs, HEVs use regenerative braking and the ICE to charge the battery. The electric motor acts as a generator, capturing energy during braking and storing it in the HEV battery. The figure below illustrates the power split architecture for HEVs, comprising a battery, DC-DC converter, motor, and generator. The speed control mechanism in the motor control unit calculates the difference between the reference motor speed (rpm) and the current RPM from the torque sensor, providing signals to the motor and drive circuit. Both PID and FOPID controllers are integrated into the speed controller.
To ensure battery performance, total electrical losses (kW) are tuned based on the first objective function. HEVs often experience electrical losses, and the total electrical losses (kW) are assessed across five different motor speed values. Both controllers show specific loss values as the speed controller considers only speed regulation error as the objective function. The second phase of the investigation focuses on the FOPID controller, which demonstrates superior performance compared to PID, with an overall average improvement of 53.529%.
Conclusion
This study centers on optimizing the HEV speed controller in a hybrid power-split transmission using the Jaya Optimization Algorithm. The performance of the fractional-order PID controller was evaluated to minimize speed regulation error and total power loss. Three distinct analyses were conducted. Significant performance improvements of approximately 53.529% were observed with FOPID in the first analysis. In the second analysis, the FOPID controller’s performance was assessed while considering speed regulation error and total electrical loss, resulting in an overall improvement of 18.54% compared to the first analysis.
The third analysis evaluated three different driving patterns, concluding that FOPID can minimize speed regulation error and total electrical loss. However, as the complexity of driving patterns increases based on their dynamic nature, further improvements are necessary. These findings provide valuable insights into enhancing the sustainability and performance of electric transportation. Future work will involve evaluating objective functions based on acceleration and deceleration patterns to improve HEV speed controller performance. Further enhancements, such as integrating Fuzzy-FOPID controllers, can be considered to ensure better dynamic performance for highly variable driving patterns.
Source Article : https://unair.ac.id/pengontrol-kecepatan-kendaraan-listrik-menggunakan-algoritma-jaya-optimization/
Link Journal : https://ieeexplore.ieee.org/document/10498786